Clé musculo-squelettique
Introduction
L’avant-bras et le poignet servent de base aux mouvements fins et habiles des doigts et du pouce. Les objets et les outils doivent être tenus dans une orientation particulière pour leur utilisation fonctionnelle. Une tasse pleine de café sera vite renversée si elle ne peut être tenue à la verticale. Cela dépend non seulement de la prise des doigts et du pouce sur l’anse de la tasse, mais aussi de la position de l’avant-bras et de la stabilité du poignet. La main doit également être orientée avec précision sur les surfaces lorsqu’elle explore l’environnement.
De nombreuses tâches de manipulation impliquent l’activité bilatérale des deux mains travaillant ensemble. Les deux mains peuvent effectuer des mouvements similaires, comme pour rouler une pâtisserie ou appuyer sur les touches d’un clavier d’ordinateur. A d’autres moments, une main peut assurer la stabilité pendant que l’autre main effectue des mouvements précis, par exemple pour remuer le contenu d’une casserole, dévisser le couvercle d’un bocal ou coudre.
Les mouvements fins des doigts et du pouce sont effectués par les muscles intrinsèques de la main. Ces muscles dépendent également des muscles de l’avant-bras pour leur force et pour la fixation de leurs attaches proximales. Ensemble, l’avant-bras, le poignet et la main forment un système interdépendant pour l’exécution des mouvements de manipulation.
Fonctions de l’avant-bras et du poignet
L’avant-bras et le poignet coopèrent à l’orientation de la main dans l’espace.
L’avant-bras :
- permet à la main de saisir des poignées et de tenir des objets dans n’importe quelle orientation dans l’exécution d’activités fonctionnelles ;
- permet à la main de fonctionner comme un organe sensoriel tactile par contact avec toutes les surfaces.
Le poignet:
- souleve la main dans une position fonctionnelle en contrecarrant l’effet de la gravité qui tend à tirer la main en flexion ou en déviation ulnaire;
- stabilise les positions relatives de la main et de l’avant-bras pendant les mouvements de manipulation.
La combinaison des mouvements de l’avant-bras et du poignet fait que la main est reliée au bras par une articulation virtuelle qui se déplace dans tous les axes.
L’avant-bras
En position anatomique, le radius et le cubitus sont parallèles. Lorsqu’un mouvement se produit dans l’avant-bras, le radius tourne et croise le cubitus. Ce mouvement du radius entraîne la main avec lui.
Lorsque le coude est fléchi, le radius et le cubitus sont parallèles, et la paume de la main est tournée vers le haut. Les mouvements de l’avant-bras sont :
- pronation : tourne la main vers le bas et le radius et le cubitus sont croisés ;
- supination : tourne la main vers le haut et le radius et le cubitus sont à nouveau parallèles.
La position ventrale est celle où la main est tournée vers l’intérieur ou vers le milieu. C’est la position fonctionnelle de la main.
Lorsque la pronation et la supination sont limitées, par exemple après des fractures de l’avant-bras, il y a une perte considérable de la fonction de la main.
- Trouver des poignées et des rails dans différentes positions, c’est-à-dire verticales, horizontales, à un angle. Saisissez chacun d’eux et remarquez comment la position de l’avant-bras change dans chaque position pour permettre à la main de saisir.
- Saisissez l’anse verticale d’une théière ou d’une cruche, puis inclinez-la pour en verser le contenu. Notez comment la prise reste la même alors que le basculement se fait par pronation et supination de l’avant-bras.
- Tourner un robinet ou une poignée de porte ronde. Les doigts et le pouce exercent une pression sur le robinet, tandis que le mouvement de l’avant-bras fournit la puissance nécessaire pour le tourner.
Articulations radial-ulnaires
Les mouvements de pronation et de supination se produisent au niveau des articulations pivotantes synoviales qui se trouvent aux extrémités proximale et distale du radius et du cubitus. Entre les deux, les tiges des deux os sont maintenues ensemble par une membrane interosseuse, une articulation fibreuse de type syndesmose (figure 6.1a).
L’articulation radio-ulnaire supérieure (proximale) se situe entre la tête du radius et l’échancrure radiale de l’ulna. L’articulation se trouve à l’intérieur de la capsule de l’articulation du coude, mais ses mouvements sont entièrement indépendants. Le radius est maintenu en contact avec le cubitus par le ligament annulaire (recouvert d’une fine couche de cartilage), qui entoure la tête du radius et est fermement attaché aux bords de l’encoche radiale du cubitus (figure 6.1b). La capsule de l’articulation du coude se confond avec le ligament annulaire de sorte que le radius peut tourner indépendamment à l’intérieur de cet anneau quelle que soit l’angulation de l’articulation du coude.
L’articulation radio-ulnaire inférieure (distale) : l’extrémité inférieure du radius pivote autour de la tête de l’ulna, et est maintenue en contact avec elle par un disque de fibrocartilage. Ce disque relie l’apophyse styloïde de l’ulna à l’encoche ulnaire du radius (figure 6.1c). L’articulation possède une fine capsule lâche, mais les os sont maintenus ensemble par le disque articulaire et la membrane interosseuse au-dessus.
Tous les muscles impliqués dans la pronation et la supination sont insérés dans le radius, qui se déplace ensuite autour de l’ulna fixe. Les supinateurs, insérés dans le radius, peuvent également aider d’autres muscles à déplacer le coude, par exemple le biceps brachial est également un fléchisseur du coude, et le supinateur aide à l’extension du coude.
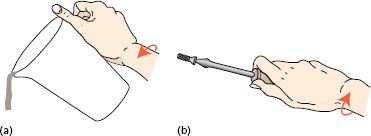
La pronation met la paume de la main à plat sur une surface, ou bascule vers l’avant un récipient tenu dans la main (figure 6.2a). De forts mouvements de pronation et de supination sont nécessaires pour utiliser un tournevis ou un tire-bouchon (figure 6.2b).
La supination est plus puissante que la pronation, c’est pourquoi la plupart des vis ont un filetage à droite.
Le brachioradialis, déjà décrit avec les fléchisseurs du coude au chapitre 5, peut déplacer l’avant-bras en position médiane à partir d’une pronation ou d’une supination complète.
Muscles produisant la pronation et la supination
Deux muscles de l’avant-bras sont actifs en pronation : le pronator teres et le pronator quadratus.
Figure 6.1 Articulations radio-ulnaires droites : (a) moyenne, vue antérieure ; (b) proximale ; (c) distale.
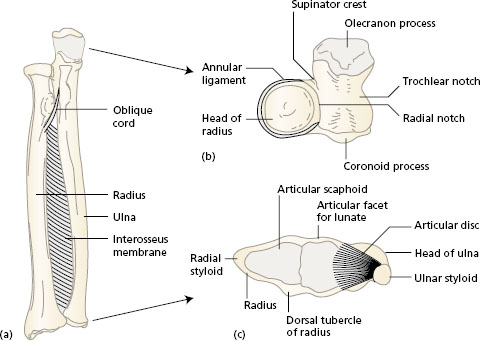
Figure 6.2 Activités impliquant la pronation et la supination : (a) verser d’une cruche – pronation ; (b) tourner une vis – supination.
Le pronator teres (figure 6.3a), qui traverse la partie antérieure de l’avant-bras depuis la face médiale du coude jusqu’à la moitié de la diaphyse latérale du radius a déjà été décrit au chapitre 5, avec les fléchisseurs du coude.
Le pronator quadratus (figure 6.3a) est un muscle profond de l’avant-bras, juste au-dessus du poignet. Ses fibres passent transversalement entre les tiges antérieures inférieures du radius et du cubitus. Le muscle est profond par rapport aux tendons fléchisseurs qui passent dans la main. Lorsqu’une force est appliquée à la main tendue en poussant ou en tombant, le pronator quadratus empêche la séparation du radius et du cubitus. De nombreux mouvements de pronation sont effectués avec le seul pronator quadratus, le pronator teres étant recruté pour une puissance supplémentaire contre la résistance.
Figure 6.3 Muscles et mouvements de (a) pronation et (b) supination. Avant-bras et main droits.
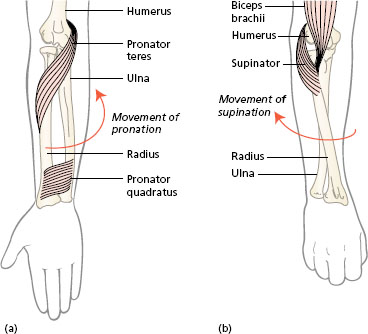
Les deux muscles actifs en supination sont le biceps brachii et le supinateur.
Le biceps brachii (chapitre 5, figure 5.13) effectue tous les mouvements de supination contre résistance. Son tendon tire sur la tubérosité radiale juste sous le coude pour faire tourner le radius en position parallèle au cubitus. Les attaches et l’action du biceps ont déjà été décrites au chapitre 5 avec les fléchisseurs du coude.
Le supinateur (figure 6.3b) est un muscle postérieur profond de l’avant-bras qui intervient dans les mouvements lents et sans opposition de supination, comme lorsque le bras pend sur le côté. Ce muscle est recouvert par les longs extenseurs du poignet et des doigts. L’origine du supinateur se situe au niveau de l’épicondyle latéral de l’humérus et des zones adjacentes du cubitus. Muscle court et plat, ses fibres entourent l’extrémité proximale du radius près de l’os et s’insèrent dans l’extrémité supérieure de la diaphyse.
Le poignet
La région du poignet est concernée par les mouvements du carpe de la main sur les extrémités distales du radius et du cubitus de l’avant-bras. L’amplitude des mouvements est augmentée par le déplacement des os du carpe les uns sur les autres, notamment entre les rangées proximale et distale.
Joints et mouvements du poignet
L’articulation du poignet est composée des articulations entre les os du carpe (articulations intercarpiennes) et de l’articulation radiocarpienne entre l’avant-bras et la rangée proximale des carpiens. L’articulation intercarpienne entre les deux rangées de carpes est appelée articulation médio-carpienne. Le principal mouvement au niveau du poignet se produit au niveau des articulations radiocarpienne et médiocarpienne.
L’articulation radiocarpienne est formée par l’extrémité distale concave du radius et un disque articulaire sur l’ulna s’articulant avec une surface réciproquement convexe formée par les trois os du carpe de la rangée proximale, c’est-à-dire le scaphoïde, le lunatum et le triangulaire (triquetral). Cette articulation est de type ellipsoïde permettant un mouvement dans deux directions (voir chapitre 2, figure 2.3c). La surface articulaire du radius et de l’ulna est représentée sur la figure 6.1c.
L’articulation médio-carpienne se situe entre la rangée proximale et distale des carpiens, c’est-à-dire les surfaces distales du scaphoïde, du lunat et du triquetral, avec les surfaces proximales du trapèze, du trapézoïde, du capitat et de l’hamat. La cavité articulaire est continue entre les deux rangées de carpiens et s’étend entre les différents os. (Le quatrième os de la rangée proximale, le pisiforme, ne participe à aucune des articulations.)
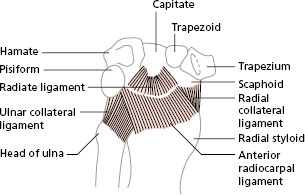
La capsule de l’articulation radiocarpienne, renforcée par des ligaments, s’étend pour recouvrir l’articulation médiocarpienne. Les deux articulations sont renforcées de chaque côté par les ligaments collatéraux ulnaire et radial (figure 6.4).
Les mouvements au niveau des articulations du poignet sont la flexion, l’extension, l’abduction (déviation radiale) et l’adduction (déviation ulnaire).
Figure 6.4 Articulation du poignet (radiocarpien) droit, aspect antérieur.
Il n’y a pas de rotation active du poignet autour d’un axe longitudinal. Rappelons que la rotation de la main sur l’avant-bras se fait au niveau des articulations radio-ulnaires de l’avant-bras, c’est-à-dire des mouvements de pronation et de supination.
Les radiographies du poignet en action montrent que tous les carpiens bougent ainsi que l’articulation radio-carpienne. Dans certains mouvements, le scaphoïde, par exemple, peut se déplacer jusqu’à 1 cm. L’articulation radiocarpienne contribue le plus à l’extension et à l’adduction, tandis que l’articulation médiocarpienne se déplace davantage en flexion et en abduction. Toutes les articulations agissent ensemble comme un seul mécanisme pour le mouvement du poignet.
- Placez la main en supination (paume vers le haut) sur une surface plane en position détendue. Remarquez la légère flexion et la déviation vers le côté ulnaire.
- Regardez un squelette articulé pour voir la forme de l’extrémité inférieure du radius se prolongeant plus loin sur le côté dorsal et latéralement au niveau du processus styloïde, ce qui explique la position de la main.
- Soulevez la main et déplacez le poignet en flexion, extension, abduction (déviation radiale) et adduction (déviation ulnaire). Notez l’amplitude de chacun de ces mouvements. Vous verrez que les mains se déplacent plus loin en flexion qu’en extension, et plus facilement en déviation ulnaire qu’en déviation radiale.
- Comparez votre propre amplitude de ces mouvements du poignet avec celle d’autres personnes. Remarquez la différence d’amplitude entre les individus, mais les quantités relatives pour chaque mouvement sont généralement les mêmes.
Puisqu’il existe une variation de l’amplitude des mouvements chez les sujets normaux, l’évaluation d’un poignet blessé doit être faite en le comparant au poignet normal de la même personne et non au poignet « moyen ».
- Fracture de Colles lorsque les extrémités inférieures cassées de l’os sont déplacées vers l’arrière ; ou
- Fracture de Smith lorsque seul le radius est fracturé et que le fragment distal se déplace vers l’avant.
Une chute sur la main avec le poignet en extension complète peut fracturer le scaphoïde. L’os scaphoïde se fracture à travers sa taille, et le fragment proximal peut mourir en raison d’une mauvaise irrigation sanguine. Cette nécrose avasculaire peut produire une douleur persistante et une faiblesse du poignet.
Muscles déplaçant le poignet
Les muscles disposés autour du poignet se combinent de différentes manières pour produire les mouvements de flexion, d’extension, d’abduction et d’adduction. Si l’on observe le poignet en coupe transversale, on peut voir les tendons fléchisseurs et extenseurs impliqués dans le mouvement du poignet autour de la forme ovale du carpe. Les tendons tirent sur le carpe selon différentes combinaisons, comme les ficelles d’une marionnette, pour produire tous les mouvements du poignet.
Les deux muscles antérieurs, actifs dans la flexion du poignet, sont le flexor carpi ulnaris et le flexor carpi radialis. Le palmaris longus est un autre fléchisseur du poignet qui se situe entre les deux autres, mais il est absent chez 15% des personnes. Ces trois muscles ont une origine commune sur l’épicondyle médial de l’humérus, et forment la couche superficielle des muscles de la partie antérieure de l’avant-bras.
Le flexor carpi ulnaris est attaché à l’os pisiforme et sur la base du cinquième métacarpien. Le flexor carpi radialis se situe en profondeur des muscles à la base du pouce lorsqu’il traverse le poignet et se termine à la base des métacarpiens 2 et 3 (figure 6.5a).
Le palmaris longus possède un long tendon fin qui s’insère dans l’aponévrose palmaire, une couche de tissu fibreux dense située sous la peau de la paume, considérée plus en détail plus loin dans le chapitre.
Figure 6.5 Fléchisseurs du poignet : (a) position dans la couche superficielle de la face antérieure de l’avant-bras droit ; (b) peignant les cheveux.
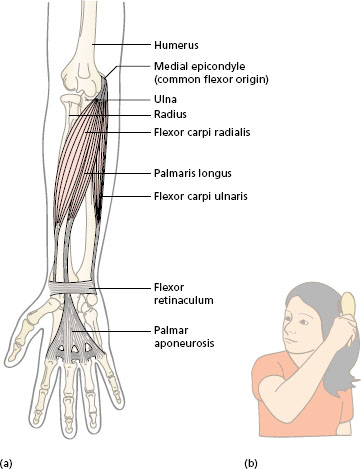
Un usage fonctionnel des fléchisseurs du poignet peut être vu dans la figure 6.5b, où ils sont utilisés pour contrecarrer la résistance offerte par les cheveux sur le peigne.
Trois muscles postérieurs, actifs dans l’extension du poignet, sont l’extensor carpi ulnaris et l’extensor carpi radialis longus et brevis (figure 6.6a). Le long extenseur radial prend naissance sur la crête au-dessus de l’épicondyle latéral de l’humérus avec le brachioradialis, déjà décrit au chapitre 5. Les deux autres muscles s’attachent à l’épicondyle latéral qui est l’origine commune de l’extenseur. Ces trois muscles descendent la face postérieure de l’avant-bras et s’insèrent au niveau du poignet en suivant le même schéma que les fléchisseurs : l’extensor carpi radialis longus dans le métacarpien 2 ; l’extensor carpi radialis brevis dans le métacarpien 3 ; et l’extensor carpi ulnaris dans le métacarpien 5.
Figure 6.6 Extenseurs du poignet : (a) position dans la partie postérieure de l’avant-bras droit ; (b) main tenue avec le poignet étendu pour utiliser un clavier.
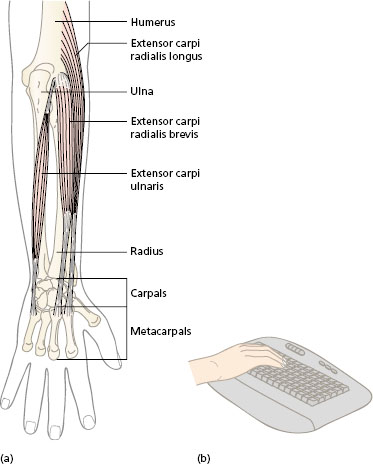
Dans l’utilisation de la main en pronation, par exemple en appuyant sur les touches d’une machine à écrire ou d’un piano (figure 6.6b), les extenseurs du poignet sont actifs pour soulever le poids de la main contre la gravité. La faiblesse de ces muscles entraîne une » chute du poignet « . Lors d’une forte préhension par l’ensemble de la main, les extenseurs du poignet agissent en synergie pour contrecarrer la flexion du poignet par les fléchisseurs des doigts longs.
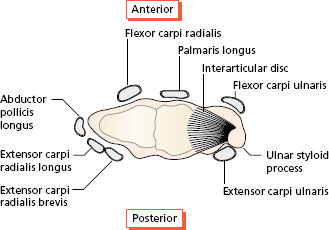
L’abduction et l’adduction du poignet sont obtenues par la contraction des muscles fléchisseurs et extenseurs du côté radial et ulnaire, respectivement. Voir la figure 6.7 pour la position des tendons autour du poignet. La contraction des muscles fléchisseur carpi ulnaris et extenseur carpi ulnaris entraîne une adduction du poignet, souvent appelée déviation ulnaire. De même, la contraction du flexor carpi radialis et de l’extensor carpi radialis longus et brevis ensemble entraîne une abduction du poignet ou déviation radiale.
La figure 6.7 montre les positions des tendons des fléchisseurs et des extenseurs du poignet disposés autour du poignet. Notez que les fléchisseurs s’insèrent dans le côté antérieur ou palmaire, et que les extenseurs s’insèrent dans le côté postérieur ou dorsal. Un poignet fort et stable dans la position médiane de l’avant-bras est utilisé pour faire fonctionner de nombreux outils, par exemple une scie. Lorsque les muscles autour du poignet sont faibles, la main tombe en déviation ulnaire en tenant l’outil.
Figure 6.7 Position des fléchisseurs et des extenseurs du poignet autour de l’extrémité distale du radius et du cubitus, vue inférieure.
Fonctions de la main
La main effectue des mouvements fins des doigts et du pouce pour actionner de petits outils et des claviers. Les muscles intrinsèques de la main se combinent pour effectuer les petits mouvements des doigts et du pouce nécessaires aux activités habiles, par exemple écrire, envoyer des textos avec un téléphone portable, peindre et jouer d’un instrument de musique.
La main est le mécanisme qui permet de saisir les poignées et les grands outils pendant que le membre supérieur les déplace dans l’espace. Dans tous les mouvements de préhension, le pouce est placé à l’opposé des doigts de différentes manières selon la taille et la forme de l’objet. Le poignet joue un rôle important dans la préhension en fournissant une base stable à la main et en dirigeant la traction des tendons des muscles de l’avant-bras qui agissent sur les doigts et le pouce. Les activités de préhension impliquent également des mouvements de relâchement pour lâcher ou poser, en utilisant le groupe de muscles opposé à celui qui effectue la préhension.
La main est également un organe sensoriel. La peau de la main, en particulier la paume et le bout des doigts, est richement pourvue en récepteurs, et une grande partie du cortex somatosensoriel du cerveau (voir chapitre 3) traite les informations qui en proviennent. Toutes les activités de préhension impliquent un contrôle continu de l’activité des récepteurs tactiles et de pression de la main. Par exemple, lors de l’écriture, la formation précise des lettres dépend de la pression correcte des doigts sur un stylo, et de la main sur le papier. La réponse des récepteurs de la peau de la main est importante pour la protéger des blessures. Un traumatisme ou des modifications pathologiques des os et des articulations du poignet peuvent endommager les fibres sensorielles des nerfs qui les traversent et affecter la sensation de la main.
Un traitement supplémentaire de toutes les informations sensorielles dans le cerveau nous permet de « reconnaître » les objets tenus dans la main sans les voir. C’est ce qu’on appelle la stéréognose (voir chapitre 3).
Enfin, la main est utilisée dans la communication et dans l’expression des émotions. Observez comment les gens utilisent leurs mains lorsqu’ils se saluent, ou discutent en groupe. Les mains sont utilisées pour compléter et renforcer la parole de manière consciente, ou peuvent être utilisées inconsciemment dans le « langage corporel ».
En résumé, les fonctions de la main sont :
- l’exécution de mouvements de manipulation fine ;
- pour saisir et relâcher des objets et des outils ;
- comme organe sensoriel pour l’exploration de l’environnement et la reconnaissance des objets ;
- dans la communication et l’expression des émotions.
Mouvements de la main : doigts et pouce
Les mouvements de la main sont réalisés par des muscles qui prennent naissance en partie dans la main (muscles intrinsèques) et en partie dans l’avant-bras (muscles extrinsèques), passant par le poignet dans la main. La main effectue des mouvements complexes et précis lors de la manipulation d’ustensiles, d’outils et d’équipements dans la vie quotidienne. L’utilisation accrue d’équipements électriques à la maison et au travail a réduit la nécessité pour la main d’exercer une grande puissance, mais a introduit une plus grande variété de mouvements de précision nécessaires pour actionner les interrupteurs et les commandes.
Un grand nombre de muscles, provenant à la fois de l’avant-bras et de la main, s’insère dans les doigts et le pouce. La plupart des tendons de ces muscles passent sur plusieurs articulations, et les combinaisons de différentes directions de traction des tendons permettent aux doigts de se déplacer de diverses manières.
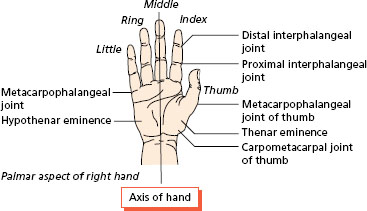
- Les cinq doigts sont numérotés de 1 à 5, de latéral (pouce) à médial.
- Les doigts sont identifiés par leur nom : index, majeur, annulaire, auriculaire.
- L’axe central de la main passe par le troisième métacarpien et le troisième doigt (majeur).
- Lorsque les doigts se séparent, les autres doigts s’éloignent de l’axe central (figure 6.8).
- Les noms des muscles qui déplacent les doigts comprennent « digitorum », tandis que ceux qui déplacent le pouce comprennent « pollicis ». Les muscles thénariens sont associés au pouce, et les muscles hypothénariens sont associés à l’auriculaire.
Articulations des doigts et du pouce
Les principales articulations sont identifiées sur la figure 6.9.
Les articulations métacarpophalangiennes (MCP), communément appelées jointures, sont formées par les articulations des têtes des métacarpiens avec des concavités ovales à la base des phalanges proximales. Le pouce, ainsi que les quatre doigts, possèdent une articulation MCP. Les articulations MCP des doigts sont des articulations synoviales ellipsoïdes et biaxiales. Chaque articulation MCP des doigts possède un solide ligament palmaire, qui est attaché fermement à la phalange mais de manière lâche à l’os métacarpien. Les ligaments palmaires de ces quatre articulations sont reliés par un ligament transverse profond, qui maintient les têtes des métacarpiens ensemble pour former le corps de la paume de la main. Les ligaments collatéraux sont des bandes présentes de chaque côté des articulations (figure 6.9). Les mouvements des articulations MCP permettent aux doigts de fléchir et de s’étendre, de s’abaisser et de s’adosser. En abduction, les doigts s’éloignent du majeur, qui forme l’axe central de la main.
Figure 6.8 Vue palmaire de la main droite ; emplacement des articulations.
.